
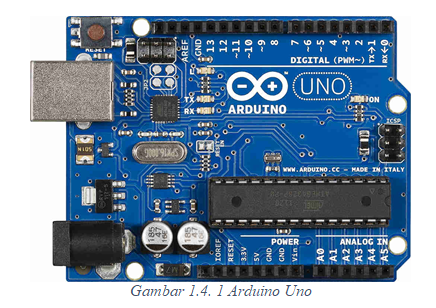
Arduino adalah kit elektronik atau papan rangkaian elektronik open source yang di dalamnya terdapat komponen utama yaitu sebuah chip mikrokontroler dengan jenis AVR dari perusahaan Atmel. Arduino yang kita gunakan dalam praktikum ini adalah Arduino Uno yang menggunakan chip AVR ATmega 328P. Dalam memprogram Arduino, kita bisa menggunakan komunikasi serial agar Arduino dapat berhubungan dengan komputer ataupun perangkat lain.
2. IC L293D

IC L293D adalah sirkuit terpadu (IC) dual H-Bridge driver untuk rangkaian motor DC. Driver motor ini bertindak sebagai penguat arus dengan mengambil sinyal kontrol arus rendah dan memberikan output ke sinyal kontrol arus yang lebih tinggi. Sinyal arus yang lebih tinggi ini lah yang digunakan untuk menggerakkan motor.

Motor Listrik DC atau DC Motor adalah suatu perangkat yang mengubah energi listrik menjadi energi kinetik atau gerakan (motion). Motor DC ini juga dapat disebut sebagai Motor Arus Searah. Seperti namanya, DC Motor memiliki dua terminal dan memerlukan tegangan arus searah atau DC (Direct Current) untuk dapat menggerakannya. Motor Listrik DC ini biasanya digunakan pada perangkat-perangkat Elektronik dan listrik yang menggunakan sumber listrik DC seperti Vibrator Ponsel, Kipas DC dan Bor Listrik DC.
4. Battery

Baterai adalah perangkat yang terdiri dari satu atau lebih sel elektrokimia dengan koneksi eksternal yang disediakan untuk memberi daya pada perangkat listrik seperti senter, ponsel, dan mobil listrik. Ketika baterai memasok daya listrik, terminal positifnya adalah katode dan terminal negatifnya adalah anoda. Terminal bertanda negatif adalah sumber elektron yang akan mengalir melalui rangkaian listrik eksternal ke terminal positif. Ketika baterai dihubungkan ke beban listrik eksternal, reaksi redoks mengubah reaktan berenergi tinggi ke produk berenergi lebih rendah, dan perbedaan energi-bebas dikirim ke sirkuit eksternal sebagai energi listrik. Secara historis istilah "baterai" secara khusus mengacu pada perangkat yang terdiri dari beberapa sel, namun penggunaannya telah berkembang untuk memasukkan perangkat yang terdiri dari satu sel.


Tidak ada komentar:
Posting Komentar